

Le projet XTerM (systèmes compleXes, intelligence Territoriale et Mobilité) a pour but de proposer des outils de management et d’aide à la décision pour la gestion « intelligente » du territoire. Le projet mené principalement par l’université du Havre et ses laboratoires est composé de cinq actions.
Il est cofinancé par l’Union Européenne à travers le Fonds Européen de Développement Régional (FEDER) et par la Région Normandie. L’opération qui a commencé le 1er octobre 2015 sera menée jusqu’au 30 septembre 2019.
L’action 5 du projet Xterm s’intéresse à l’usine du futur et plus particulièrement à l’introduction de la robotique dans les entrepôts logistiques. Elle est menée par trois laboratoires : Le GREAH, le CESI recherche, l’IRSEEM.
Ils travaillent ensemble pour améliorer les conditions de travail des salariés dans un entrepôt logistique :
- Diminuer les troubles musculo-squelettiques dû à des mouvements répétitifs
- Diminuer la pénibilité du travail
- Augmenter la productivité des entreprises
Afin de mettre en place des solutions robotiques qui pourront améliorer l’environnement de travail, les équipes de l’action 5 doivent prendre en compte différents points comme :
- Les dimensions importantes d’un entrepôt logistique
- La taille, la texture et le poids divers des produits que les robots devront saisir.
Enfin l’introduction de robots au sein d’un entrepôt logistique permettrait à l’entreprise de gagner en flexibilité grâce à la polyvalence des robots.
https://poly.google.com/view/6yONdOnfi3Q/embed?chrome=minLes livrables

Les travaux de doctorat de M Benali ont pour objectifs de concevoir et commander un torse humanoïde à deux bras afin de saisir et déplacer des colis de taille variable. Cette solution est beaucoup plus polyvalente que l’utilisation d’un préhenseur fixé à l’extrémité d’un bras manipulateur.
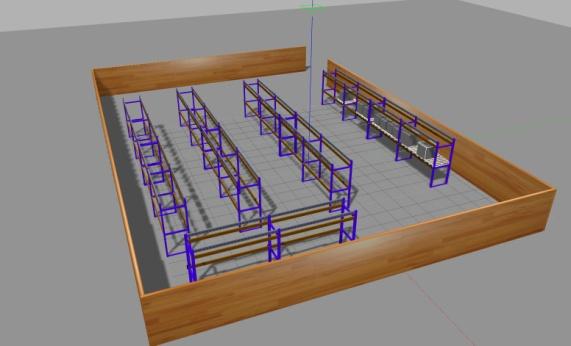
Une interface graphique permettra à un utilisateur novice de créer son entrepôt en 3D. A partir de là, il sera possible d’utiliser ce modèle dans le simulateur Gazebo de ROS pour y faire évoluer un manipulateur mobile et tester différents scénarios.
Une application robotique pour le e-commerce sera mise en place dans la halle robotique du PIL comprenant:
- un robot Baxter qui viendra identifier et saisir des produits se déplaçant sur un convoyeur
- un manipulateur mobile qui ira saisir l’objet désiré au niveau du rack de stockage en se déplaçant dans les allées.
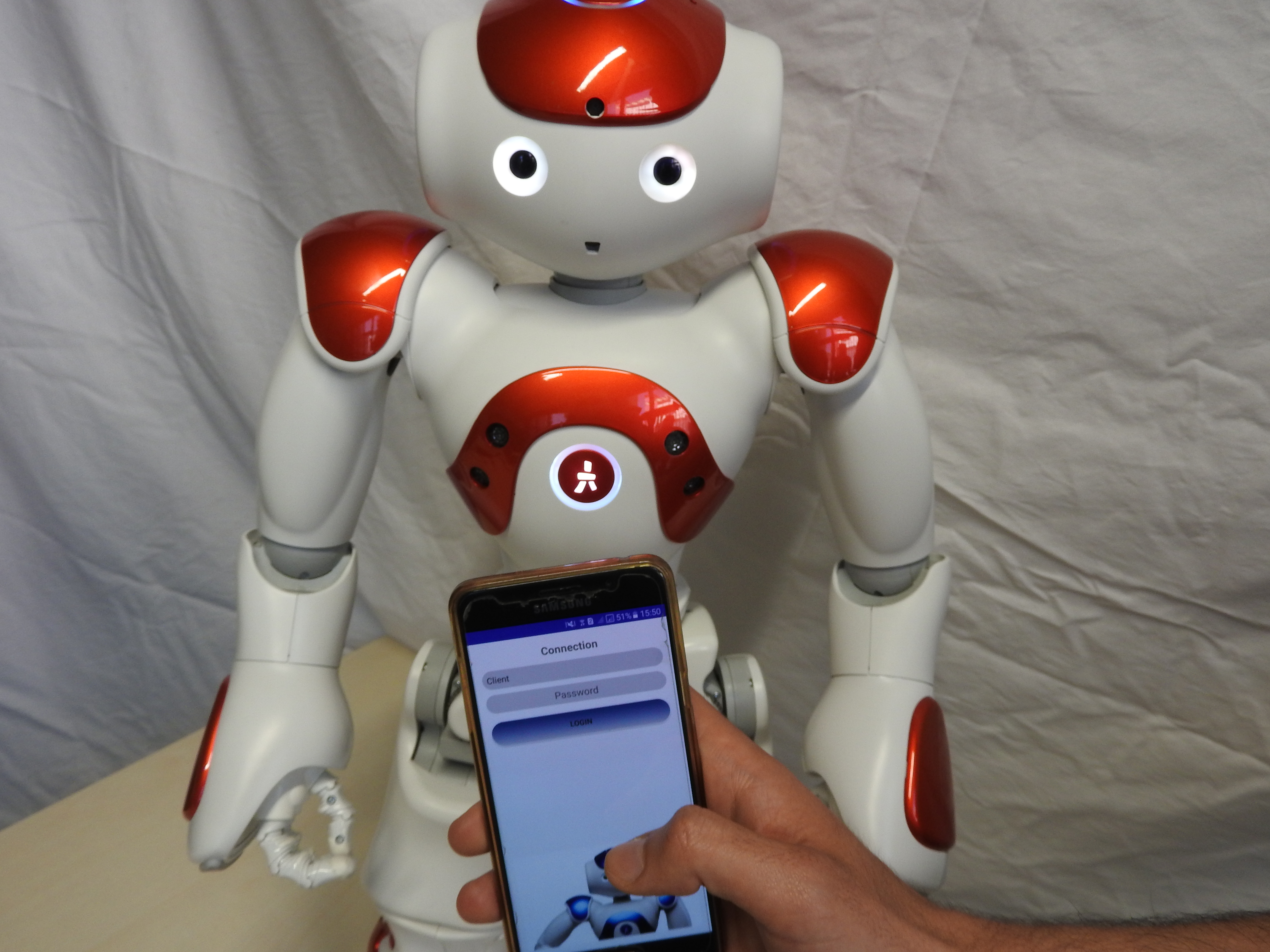
Via une application, l’utilisateur pourra commander les produits en fonction des stocks mis à jour en temps réel.
Les informations parviendront au robot Nao qui communiquera le plan d’action aux humains et robots de l’entrepôt afin de répondre aux besoins dans les meilleurs délais.
